在辅料使用方面,可持续发展的创新方法可以包括以下几个方面:使用可再生资源:选择使用来源于可再生资源的辅料,如使用可再生植物原料制成的生物降解塑料替代传统塑料。这有助于减少对非可再生资源的依赖以及对环境的负面影响。降低资源消耗:采用更高效的生产工艺或技术,以减少辅料的使用量。例如,通过改进涂料配方和施工技术,降低涂料的涂布厚度,减少使用量,同时仍保持良好的性能。循环利用和回收:设计辅料的生命周期考虑到其在使用结束后的回收和再利用。例如,选择可回收的包装材料,促进辅料包装的回收率。此外,提供辅料回收和再生利用的服务也是一种可持续的创新方法。采用低碳技术:选择低碳排放的生产工艺或技术,以减少辅料生产过程中的温室气体排放。例如,采用水基涂料替代溶剂基涂料,可以减少挥发性有机化合物(VOC)的排放。推动绿色化学:致力于绿色化学研究和创新,开发无毒、低环境影响的辅料。这可以减少对有害化学物质的使用,降低环境污染风险,并提高辅料的可持续性。绝缘PI被用于手机中的电子元件,以确保其与机壳的绝缘效果。山东手机贴合系统厂商

手机辅料的定性与定量分析通常包括以下步骤:确定分析目标:首先明确你希望分析的手机辅料是什么,例如电池、屏幕、摄像头等。确定具体的分析目标,例如检测辅料中的特定成分、确定辅料的质量或性能等。定性分析:定性分析是确定辅料中存在的化学成分或物理性质的过程。常用的定性分析方法包括:观察和目测:通过外部特征、颜色、形状等来初步判断辅料的性质和组成。外观检查:使用显微镜等仪器观察辅料的微观形态,例如晶体形状、颗粒大小等。化学试剂测试:使用化学试剂进行颜色反应、沉淀反应、气体生成反应等,以确定分析物的存在与性质。光谱分析:使用光谱仪器(如红外光谱仪、质谱仪等)分析辅料的分子结构和组成。定量分析:定量分析是确定辅料中特定成分含量或性能的过程。常用的定量分析方法包括:重量法:测定辅料的重量或重量变化,通过计算可以得到特定成分的含量。体积法:测定辅料的体积或体积变化,通过计算可以得到特定成分的含量。光谱分析:使用光谱仪器进行定量分析,例如紫外可见光谱、原子吸收光谱等。电化学分析:使用电化学方法(如电位滴定、电流测量等)进行定量分析。机器人贴合系统报价真空辅料贴合机采用PLC控制,动作可靠、操作简单。

辅料在手机设计中可以是指材料、颜色、纹理、装饰等元素。调整辅料的比例可以通过以下几种方式实现:材料选择:不同材料的使用比例可以影响手机的外观和触感。例如,金属、塑料、玻璃等材料可以用于手机的外壳,而皮革、布料等材料可以用于手机的装饰。通过选择不同的材料并调整其使用比例,可以改变手机的整体风格和质感。颜色搭配:手机的颜色搭配可以通过调整不同颜色的使用比例来实现。某些颜色可以用作主色调,而其他颜色可以用作辅助色调或强调色。通过调整不同颜色的比例,可以塑造手机的整体色彩效果,使其更具吸引力和个性。纹理和装饰:手机的纹理和装饰也可以通过调整比例来改变。例如,可以在手机外壳上添加不同的纹理,如金属纹理、碳纤维纹理或皮革纹理。此外,还可以通过增加装饰元素如Logo、图案、刻花等来调整手机的外观效果。
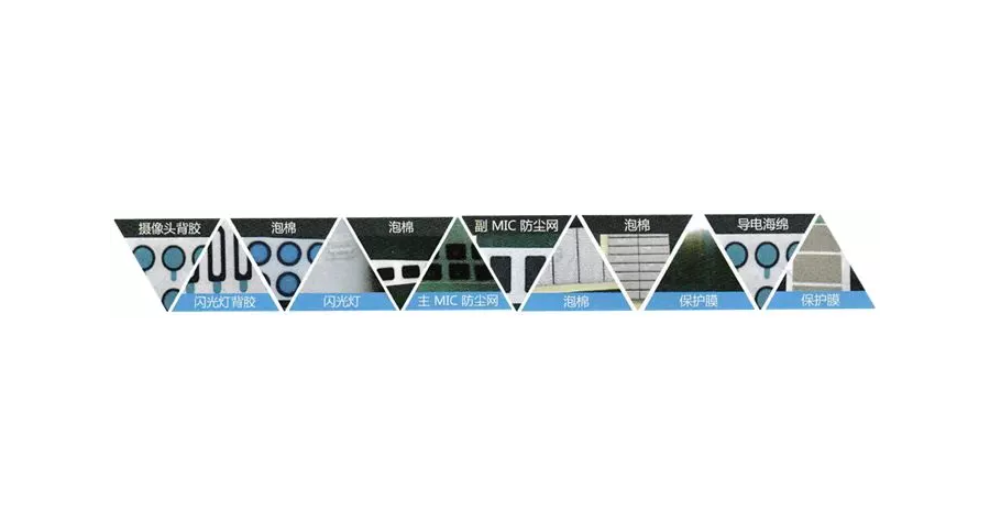
视觉辅料贴合系统在各行各业中的应用(电子产品类):"视觉辅料贴合系统是我们深圳市旗众智能科技有限公司对需要贴付的辅料,通过视觉系统对吸取的辅料进行位置和角度偏差纠正,快速拾取并准确地将辅料贴装在指定的位置上;能够解放人手作业, 视觉辅料贴合系统主要优势在于夹具调节方便,无需专门的治具,更换产线较为快捷。另外,通过视觉定位,可以保证较高的贴装精度。是一套功能齐全、高精度、高加工效率的智能系统, 是3C电子行业的完美解决方案。 贴附辅料时要确保贴合表面无油污、灰尘和杂质,以保证准确的粘合效果。

点胶时出现拉丝、拖尾情况怎么办?视觉点胶机在各个领域应用非常普遍,但在使用时或多或少都会遇到点胶机拉丝、拖尾的情况,那么这种情况该如何解决呢?其实啊,出现这种情况可能是:胶水黏度过高、胶水流动不畅、点胶针头或压力不合适、移动速度过快、点胶距离过大等原因,而想要有效解决这些问题,你只需用到旗众智能点胶控制系统。旗众智能点胶控制系统对于这一问题,针对性的提供了几点解决方案:"1、拉丝方式:对不同的胶水和工艺,可以选择不同的拉丝方式来处理,旗众智能视觉点胶系统就搭载了普通上抬、斜拉上抬等7种拉丝处理方式2、距离控制:用户可在软件工艺参数中通过设置详细的拉丝高度、长度、关胶距离来处理3、时间控制:软件提供了开胶延时、关胶延时、开胶前延时、关胶前延等参数设置,用户可根据具体需求来设置"。 辅料贴合要遵守相应的操作规程和标准,确保贴合工艺的稳定性。上海视觉贴合系统加工
辅料贴合可以使用自动化设备和机器人技术,提高贴合效率和一致性。山东手机贴合系统厂商
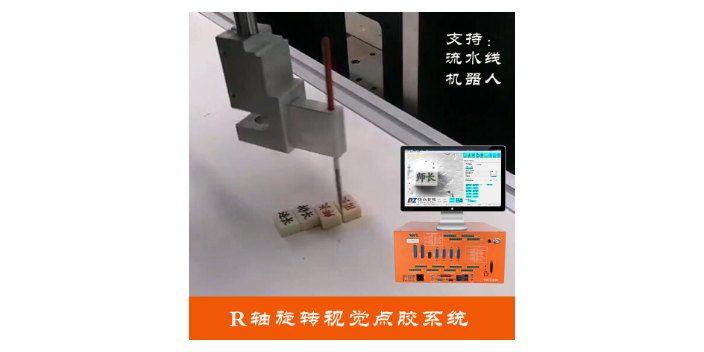
机器人流水线跟随点胶系统:机器人流水线跟随点胶系统是旗众智能专为基础机器人流水线点胶加工而研发的一套系统。可以自动跟踪,视觉定位识别点胶的区域,然后进行点胶位置的自动补偿,实现对点位的追踪,快速准确机器人通过视觉自动抓拍产品的坐标信息,实现对输送带上产品的动态跟踪和高精度的随动点胶,使得它可在极小的缝隙间很好地完成点胶工作。准确点胶的前提是什么?规划轨迹转换为现实轨迹,是准确点胶的前提。那么如何保证转换的效果呢?可以借助一站式自动标定方案,主要包括以下两点:1、机台初始标定,精度偏差0.02毫米2、胶头与工件的位置标定,使用2D或3D视觉识别,快速获取点胶头和工件的实际安装位置,偏差精度0.02毫米。 山东手机贴合系统厂商