视觉点胶系统通常使用摄像头或激光传感器来实现精确定位和控制点胶过程。虽然具体的工作原理需要会因具体系统而有所不同,但是我可以给你一个一般的概述。摄像头工作原理:摄像头是一种光学传感器,通过使用透镜捕捉光线并将其转换为电信号来捕捉图像。它通常由成像传感器、透镜、光学滤波器和图像处理电路组成。工作过程如下:光线通过透镜进入成像传感器,成像传感器将光线转换为电信号。电信号经过电路处理和放大后,被转换为数字图像,这样就可以对图像进行分析和处理了。图像处理算法可以用于检测特定的目标、边缘、颜色等,并提取所需的信息用于点胶过程的位置校准和控制。视觉点胶系统的全景视觉功能可以实现多角度的图像识别和定位。东莞多轴视觉点胶系统公司电话
视觉点胶系统可以通过多种方式来控制胶水的流量,以满足不同的点胶需求。以下是几种常用的控制方式:配置精确的点胶阀:视觉点胶系统通常配置有精确控制胶水流量的点胶阀。这些阀门具有可调节的喷嘴大小和胶水流量控制装置,可以根据需要控制胶水的流速和流量,以确保达到所需的点胶效果。调整点胶阀的开启时间:通过调整点胶阀的开启时间,可以控制每次点胶的胶水流量。开启时间越长,流出的胶水越多,开启时间越短,流出的胶水越少。通过实时监测点胶位置和路径,视觉点胶系统可以根据需要控制每个点胶位置的开启时间,以实现精确的胶水流量控制。东莞五金上色机视觉点胶系统供应商智能化的视觉点胶系统提高了工作效率,降低了生产成本。
视觉点胶系统在应对不同尺寸和形状的工件时,通常采用以下方法:工件识别:视觉点胶系统使用摄像头或激光传感器获取工作环境中的图像信息,并通过图像处理和识别算法来实时检测工件的形状、大小和位置等特征。系统可以预先存储不同尺寸和形状的工件样本,并与实际工件进行比对,从而确定工件的类型和位置。模板匹配:视觉点胶系统可以使用事先建立的工件模板进行匹配。通过对不同尺寸和形状的工件进行模板训练,系统可以在后续的操作中通过模板匹配来确定工件的位置和形状。自适应算法:视觉点胶系统中的图像处理软件通常具有自适应算法,可以根据不同尺寸和形状的工件动态调整参数和算法,以适应不同的工件需求。系统可以根据工件的特征自动调整点胶的位置、速度和压力等参数,从而实现对不同尺寸和形状工件的精确点胶。
视觉点胶系统在多样化产品生产中面临许多挑战,例如产品形式的多样性、零部件的变化和生产过程的多样性等。以下是一些视觉点胶系统可以应对这些挑战的策略:灵活性设计:视觉点胶系统应该具备灵活的设计能力,能够快速适应新产品或零部件的变化。这需要系统具有易于配置和调整参数的功能,可以在不同的生产环境和产品参数下实现高效的点胶工作。视觉算法优化:为了满足不同产品的点胶要求,可优化视觉算法,使之能够对不同的产品、形状和尺寸进行准确的定位和精确的点胶。数据库管理:视觉点胶系统可以设置产品参数和生产工艺等信息的数据库。这样,当生产新产品或不同的零部件时,系统可以从数据库中获取所需的信息和参数,使之快速地进行点胶工作。智能学习:视觉点胶系统可以具备智能学习能力,通过对生产过程中的数据进行分析和学习,以适应复杂的多变性生产环境和工艺场景。系统可以利用这些数据,并对未来的点胶过程进行预测,从而减少人工配置和提高工作效率。视觉点胶系统的高速反应能力使得其在很大强度生产环境中表现出色。
视觉点胶系统可以通过以下几种方式来提高准确性:高精度传感器:使用高精度的视觉传感器可以提供细致的图像信息,从而准确地识别目标位置和形状。增加相机分辨率:提高相机的分辨率可以捕捉更多的细节信息,减小图像畸变和误差。优化光照条件:适当的照明条件可以提高图像的质量,减少光照变化对图像分析的影响。使用适当的算法:选择合适的图像处理和分析算法,如边缘检测、拟合曲线等,可以更准确地提取目标的形状和位置信息。校准和校正:对视觉系统进行周期性的校准和校正,以确保传感器和设备之间的准确对齐,并使系统保持在较好工作状态。引入机器学习方法:通过使用机器学习方法,可以训练模型来学习并预测目标的位置和形状,从而提高系统的准确性。通过视觉点胶系统,企业可以实现定制化生产,满足不同客户需求。中山流水线跟踪视觉点胶系统配置
智能控制系统使得视觉点胶系统具有较强的自适应能力,适用于不同需求。东莞多轴视觉点胶系统公司电话
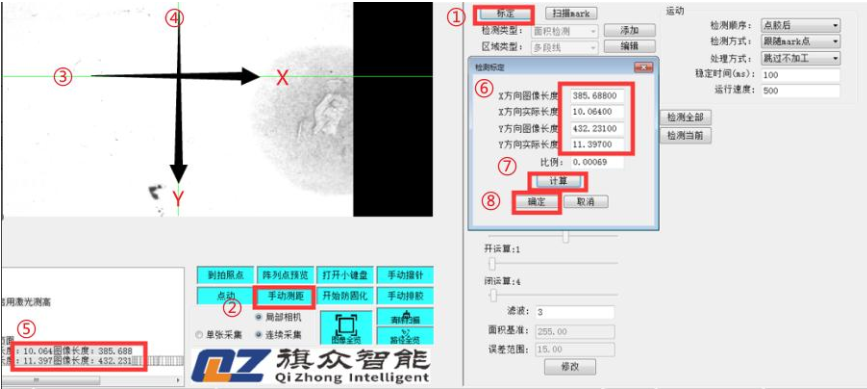
视觉点胶系统在使用之前需要进行定位校准,主要包括机械位置校准和视觉位置校准。机械位置校准:保证点胶准确度的前提是要先保证机械结构的准确度,因此需要进行机械位置校准。首先需要通过手动控制机械臂将各关节移动到规定位置,如机械臂的零位、水平位、垂直位等。这些位置需要与机床坐标系建立对应关系。然后需要通过机器人控制系统中的机械补偿功能,对机械臂在各关节的误差进行补偿,保证其运动的精度和准确度。视觉位置校准:首先需要安装并调试好相机、光源等视觉系统硬件设备。然后需要准备标定板,标定板上通常会有一系列已知大小的标记,可以通过标记在图片中的位置来计算相机内外参数,建立相机坐标系和机床坐标系之间的转换关系。进行视觉位置校准时,需要通过点胶笔尖和相机之间的坐标变换,将视觉坐标系中的点转换到机床坐标系中。东莞多轴视觉点胶系统公司电话