视觉点胶系统在生产过程中的数据采集和分析方面提供了重要的帮助。以下是一些相关的优势:实时数据采集:视觉点胶系统可以实时采集生产过程中的数据,包括点胶位置、速度、质量等信息。这些数据可以帮助生产团队了解生产过程的实时状态,快速发现潜在问题并采取相应的措施。过程监控和控制:通过数据采集和分析,视觉点胶系统可以监控点胶过程中的关键参数,并实时反馈给控制系统。基于采集到的数据,生产团队可以实现对点胶过程的精确控制,提高生产效率和产品质量。缺陷检测:视觉点胶系统可以对点胶过程中的缺陷进行检测和分析。通过图像处理和算法分析,系统可以快速识别并定位点胶中的缺陷,如气泡、溢胶等。这有助于及早发现问题,并进行及时的纠正。激光传感器的应用大幅提高了视觉点胶系统的检测精度。浙江流水线视觉点胶系统
视觉点胶系统具有自动化学习的功能,因为它不只具备先进的视觉识别技术,而且集成了机器学习算法。通过不断积累和分析数据,系统可以自动进行学习和优化,提高其识别和处理能力。例如,在点胶过程中,视觉点胶系统需要需要识别不同的工件形状和大小,并确定正确的点胶位置和路径。在与真实工件的交互中,系统会不断收集数据并基于这些数据对模型进行训练和改进。这种自动化学习过程可以不断提高系统的准确性和稳定性,从而实现更高效的生产。此外,视觉点胶系统中的机器学习算法还可以用于提高系统的自主决策能力。例如,在检测到某些异常或不符合要求的情况下,系统可以自动进行调整和纠正,从而保证生产效率和质量。浙江流水线视觉点胶系统操作人员可以轻松设置参数,系统即可根据要求自动完成准确的点胶工作。
视觉点胶系统在灰尘多的工作环境下需要会受到一定的影响,但现代的视觉点胶系统通常会采取措施来应对这种情况,以确保系统的正常工作。在灰尘多的环境下,系统需要会受到以下几方面的影响:图像识别:灰尘需要会附着在工件表面或摄像头上,导致图像质量下降,影响图像识别的准确性。此时,系统需要需要进行额外的图像处理来消除或减少灰尘的干扰,或是采用更高灵敏度的图像传感器来提高图像的清晰度。精确定位:灰尘的存在需要会干扰系统对工件位置的精确定位。在系统设计时,可以考虑使用多个视觉传感器或结合其他传感器,如激光测距仪,以提高定位的精度和稳定性。精密结构保护:灰尘需要会进入系统的关键部件或机械结构中,导致部件的磨损或故障。因此,在设计视觉点胶系统时,需要考虑良好的密封和防护设计,以减少灰尘的进入并保护系统的正常运行。
视觉点胶系统在点胶过程中有一些策略和控制方法,以避免漏胶或喷胶过多的情况。以下是几种常见的方法:视觉检测与路径规划:视觉点胶系统通过实时检测工件表面的形状、大小和位置等特征,并进行图像处理和分析,确定点胶的位置和路径。在路径规划过程中,系统会考虑胶水的流动性和点胶位置的刚性需求,以避免胶水溢出或点胶不足。系统会根据点胶目标的要求,计算出适当的点胶路径,并在点胶过程中实时调整胶水的流量,确保点胶准确、稳定且符合要求。喷嘴设计和调节:视觉点胶系统通常配备可调节喷嘴大小和流量的点胶阀。通过调节喷嘴的直径、流道和出胶口的尺寸等参数,可以控制胶水的流量。经过事先的实验和调试,根据胶水的性质和点胶需求,系统可以选择适当的喷嘴,并通过调整喷嘴的开启时间和胶水供给压力等参数,控制胶水的流量,避免漏胶或喷胶过多的情况。应用先进的图像处理技术,视觉点胶系统保证了高精度的点胶效果。
视觉点胶系统通过使用相机和图像处理算法实时检测工件表面的特征。以下是一般的工作原理:相机采集图像:系统中的相机负责将工件表面的图像捕捉下来。相机可以设置在点胶头旁边或其它合适的位置,以获得较好的视野和对工件表面的清晰成像。图像处理:通过对相机捕获的图像进行处理,包括图像滤波、光照校正、边缘检测、图像分割等步骤,提取出工件表面的特征。这些特征需要是形状、轮廓、颜色、纹理等信息。特征提取和分析:经过图像处理后,系统会对特定的特征进行提取和分析。这可以包括测量工件的尺寸、位置、角度,检测表面缺陷或异物等。特征匹配和定位:视觉点胶系统需要需要根据工艺要求将胶水精确地点在特定的位置或图案上。通过特征匹配和定位算法,系统可以将检测到的特征与预定义的目标特征进行对比,从而确定较好的点胶位置。全景+局部双重视觉定位系统结合了高效性和高精度,适用于多种工业应用场景。佛山智能视觉点胶系统供货商
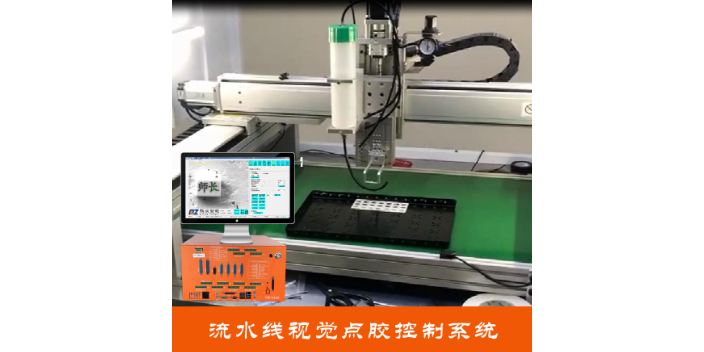
高效胶水点胶技术使得视觉点胶系统成为电子工业的不可或缺之物。浙江流水线视觉点胶系统
视觉点胶系统通过以下步骤来确定点胶的位置和路径:图像获取:系统使用摄像头或激光传感器获取工作环境中的图像信息。这些图像可以是工件表面的照片或激光扫描得到的三维点云数据。图像处理:系统使用高效的图像处理软件对获取的图像进行分析和处理。图像处理可以包括噪声过滤、边缘检测、形状匹配等算法,以提取出图像中的特征信息。特征识别:系统对处理后的图像进行特征识别,包括识别工件的形状、大小、位置以及其他关键特征。这些特征可以通过比较图像中的特征与预设的模板或标准来进行匹配。点胶位置计算:基于识别到的特征信息,系统计算点胶的位置。这通常涉及到将图像中的特征坐标映射到工件的实际坐标系中,以确定点胶的目标位置。浙江流水线视觉点胶系统