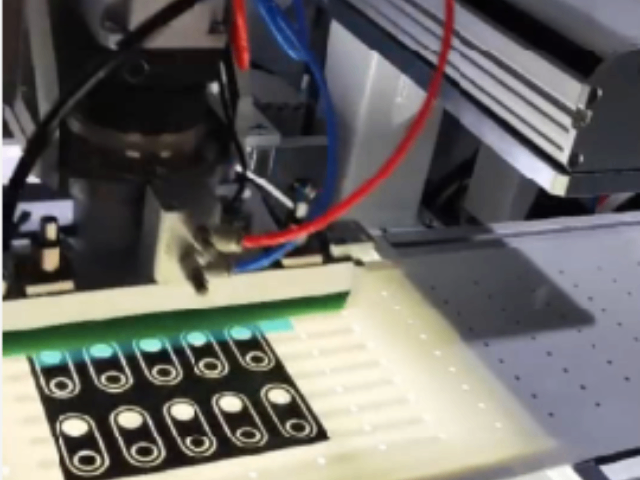
流水线视觉点胶系统:它是一款专门适用于流水线点胶作业的系统,完美实现设备厂商要求的“左进右出”加工模式,即流水线左侧自动进料,中间加工,右侧出料。它比较大的特点就是同步控制点胶产品的运动速度,与高速点胶阀完美配合,能够切换自如地应对不同路径的点胶。适用于产品批量点胶加工,可一直保持运动,定位准确,工件可随意摆放,支持CAD编辑及导图,多产品混合加工(不同高度、不同尺寸),既能实现像机械手一样可实现高自由度、全方面无死角的点胶作业,又能轻松实现与现有产线的无缝对接。 点胶软件应对环境温度变化影响胶水流动性的能力。东莞高速点胶软件定制
点胶软件在电子元器件制造中有普遍的应用。以下是一些常见的应用场景:表面贴装(Surface Mount Technology,SMT)点胶:在电子元器件表面贴装过程中,点胶软件可以控制点胶设备对电子元器件进行精确的涂胶操作。它能够识别并覆盖精确的胶滴或胶线,确保元器件与PCB板之间的粘附性和稳定性。密封与封装:在电子元器件的密封与封装过程中,点胶软件可以控制点胶设备进行胶水的均匀涂布,确保元器件的封装完整性和防护性。例如,用于封装LED灯珠的胶水涂布,点胶软件可以控制胶水的涂布厚度和均匀性。线束固定与保护:在电子线束制造中,点胶软件可以控制点胶设备对线束进行固定和保护。它能够精确地涂布胶水在线束连接点和受力部位,增强线束的结构强度和防护性。智能点胶软件软件点胶软件是一款高效的工具,能够帮助用户快速完成复杂的点胶任务。
点胶软件在微电子行业中可以发挥多种作用,主要包括以下几点:精确控制点胶过程:点胶软件可以精确控制点胶机器人的运动路径、速度和压力,确保在微电子组装过程中点胶位置准确、稳定,避免浪费材料和提高生产效率。优化生产工艺:通过点胶软件的模拟和优化功能,可以预先评估点胶过程中需要出现的问题,优化点胶路径和参数设定,提高产品质量,降低生产成本。自动化生产管理:点胶软件可以与生产管理系统集成,实现生产过程的自动化管理和数据采集,监控生产效率、产品质量,为生产决策提供数据支持。提升生产灵活性:点胶软件支持灵活的编程和设定功能,可以快速调整点胶路径和参数,适应不同产品的点胶需求,提高生产线的灵活性和适应性。
点胶软件是用于控制自动点胶设备的软件,常见的功能模块包括:点胶路径规划:提供点胶路径的规划功能,可以根据产品的要求生成适合的点胶轨迹,确保点胶位置准确。点胶参数设置:允许用户设置点胶过程中的参数,如点胶速度、压力、时间等,以满足不同产品的要求。视觉辅助定位:配合视觉系统实现自动定位功能,通过识别产品表面的标记或特征,将点胶头准确地对准要点胶的位置。多轴运动控制:支持对多轴运动系统的控制,可以控制点胶头在三维空间内进行移动,以实现复杂的点胶路径。点胶模式选择:提供不同的点胶模式选择,如点胶线条、点胶面积等,以满足不同产品的点胶需求。点胶图形编辑:提供图形编辑工具,允许用户创建、编辑和修改点胶路径,以便更加精确地控制点胶位置和形状。操作点胶软件需要需要一定的培训,以熟练掌握其操作方法。

旗众智能视觉点胶软件功能说明:"强大的路径编辑功能:支持画点、线、面、多线段、圆弧、圆等功能,可实现三维或曲面产品以及立体的复杂轨迹路径。丰富的图形编辑功能:支持阵列、旋转、镜像、复制、批量与自定义编辑一应俱全,文件编辑可多次“撤销”“重做”,有效防止误操作。全方面的点胶工艺解决方案:胶量大小、轨迹粗细、涂胶速度、点胶时间、停胶时间皆可由参数设定,支持真空回吸、斜拉上抬,多面旋转点胶,联动点胶等工艺处理功能。便携的文件导入功能:支持PLT/DXF格式文件的导入和保存,加工文件可图形预览与快速查找,方便快速导入加工。高级拓展模块功能:支持激光测高、称重、MES系统、二维码识别、自动对针、自动擦胶、定时排胶等功能,支持与PLC、机械手等进行串口或网口通讯,支持非标定制。" 点胶软件支持多种胶水粘度,能够满足不同的生产需求。杭州工业点胶软件供应商
点胶软件实现生产数据的实时监测和分析,帮助优化生产过程。东莞高速点胶软件定制
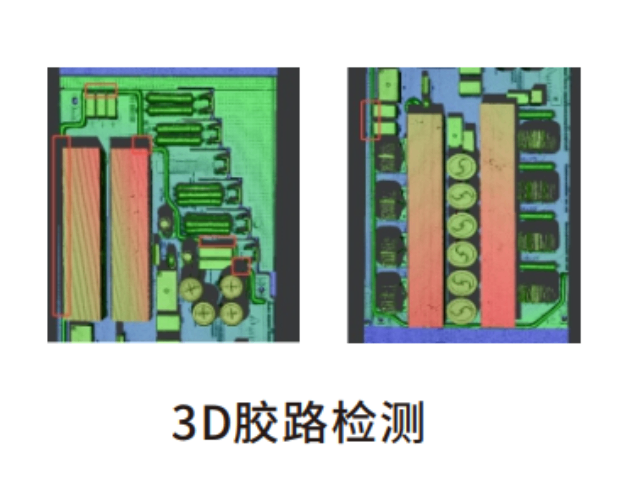
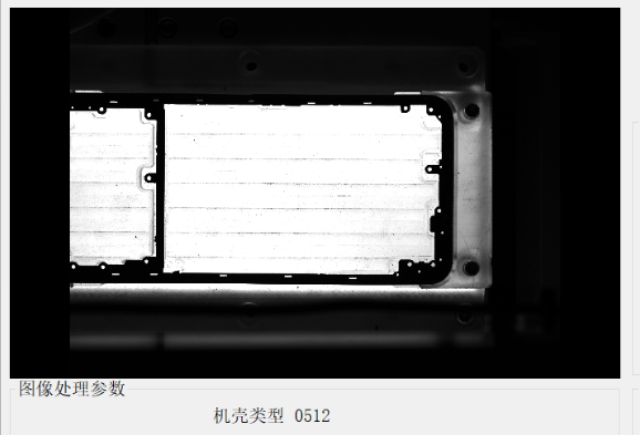
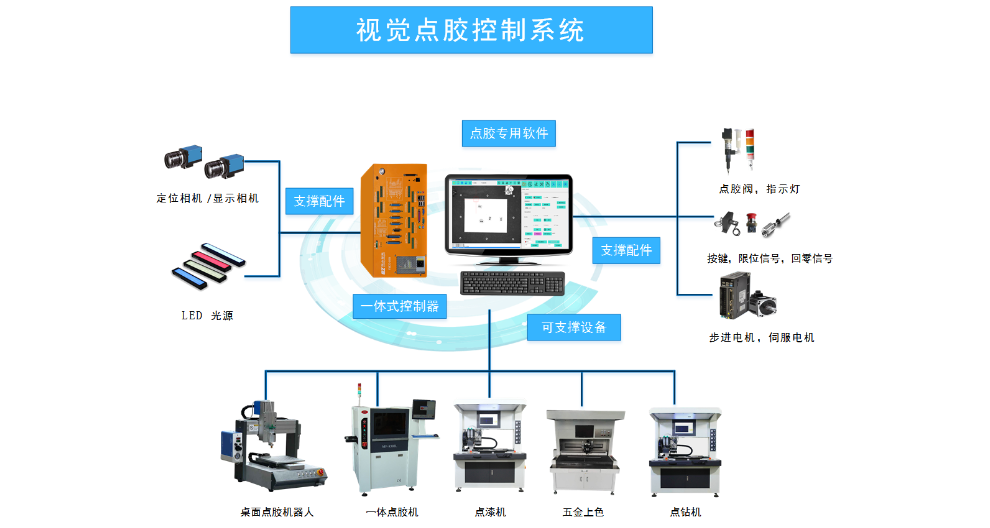
视觉系统对于点胶过程的精度是至关重要的,它可以实现点胶过程的自动化和高精度控制,确保点胶过程的准确性和稳定性。而点胶软件与视觉系统的结合,可以进一步提高点胶过程的准确度和自动化程度。具体而言,点胶软件与视觉系统的结合主要分为以下几个阶段:1.产品定位识别通过视觉系统获取工件的位置和方向信息,实现自动化对位,使机器人的抓取和点胶操作与工件的位置和角度精确匹配。点胶软件根据这些信息,计算出点胶路径和位置,控制机器人按照设定轨迹进行点胶。2.图像处理和识别视觉系统可以对图像进行处理和分析,如圆形、椭圆形、线段等的拟合,找出相关的特征和边缘。点胶软件可以利用这些信息,进行精确的坐标和速度计算,完成高精度的点胶操作。东莞高速点胶软件定制