- 品牌
- TOYO,YAMAHA,东佑达,雅马哈,捷勃特
- 型号
- GBT-S3A,GBT-P7A,IRC-I4A-C
- 产地
- 上海
- 可售卖地
- 全国
场景裂变:从制造车间到人类生活全渗透捷博特机器人的应用边界正在突破传统工业领域,形成“制造-服务-特种”三位一体的生态布局:1.智能制造主战场汽车行业:在广州某新能源车工厂,32台捷博特机器人组成柔性产线,支持6款车型混流生产,换型时间从4小时压缩至18分钟3C电子:深圳某手机厂商部署视觉引导机器人,实现0.005mm精度的摄像头模组装配,人工干预频次下降90%食品医药:无菌车间内的包装机器人,通过气动密封技术使菌落总数控制在<10CFU/m³,远超GMP标准2.服务机器人新蓝海医疗领域:手术辅助机器人完成全球首例5G远程脊柱微创手术,操作误差<0.2mm农业应用:果蔬采摘机器人通过多光谱识别成熟度,采收速度达1200个/小时,损伤率0.5%城市服务:地下管网检测机器人搭载激光甲烷探测仪,10秒定位0.1ppm级燃气泄漏3.特种作业突破深海勘探:耐压1000米的水下机器人,完成海底光缆精细修复核电站运维:抗辐射机器人替代人工进入高剂量区域,年减少人体辐照剂量1500mSv依托强大研发团队,捷勃特可根据客户需求定制机器人解决方案,适配不同行业的特殊作业要求。新余多功能捷博特
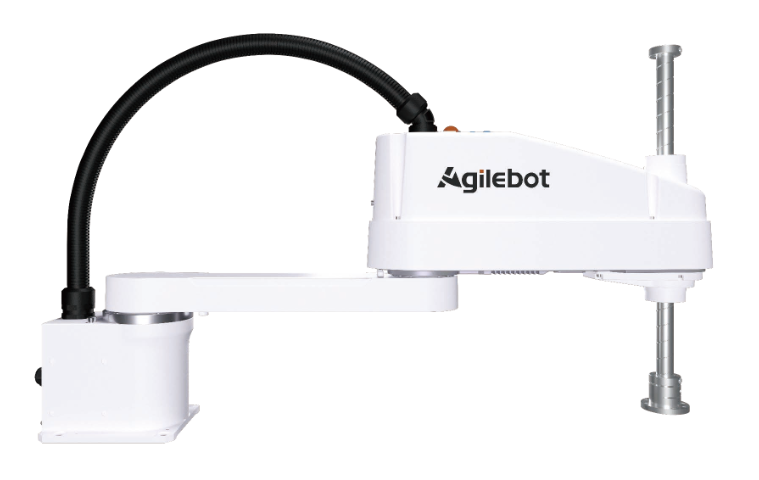
捷博特机械手凭借其先进的技术和精密的制造工艺,实现了极高的定位精度和重复定位精度。在实际应用中,其定位精度可达±0.05mm,重复定位精度可达±0.02mm,能够满足各种高精度生产任务的需求。同时,机械手的机械结构和控制系统经过严格的优化和测试,具有出色的稳定性和可靠性,能够在长时间、高度的工作环境下保持稳定运行,有效降低了设备故障率,提高了生产效率。捷博特机械手拥有多种型号和规格,负载能力从几千克到数百千克不等,能够满足不同行业和生产场景的需求。无论是小型零部件的精密装配,还是大型工件的搬运和加工,捷博特机械手都能够轻松胜任。此外,机械手的关节活动范围大,工作空间灵活,能够在狭小的空间内完成复杂的动作,为生产布局提供了更大的灵活性。厦门工业捷博特解决方案捷勃特机器人在汽车焊接时,能自动补偿 0.1mm 钣金件形变,使焊接合格率从 92% 升至 99.6% 。
捷博特将积极建设工业互联网平台,实现机械手设备的互联互通和数据共享。通过工业互联网平台,客户可以实时监控机械手的运行状态、故障信息等,实现远程诊断和维护。同时,平台还可以收集和分析大量的生产数据,为企业的生产决策、产品优化和服务创新提供支持。捷博特机械手作为工业自动化的力量,凭借其先进的技术、其性能和广泛的应用,在多个行业中发挥了重要作用。通过不断的技术创新和产品优化,捷博特机械手在精度、负载能力、稳定性、智能化等方面取得了进步,为企业提高生产效率、降低成本、提升产品质量提供了有力的支持。
视觉传感器能够快速识别目标物体的形状、位置和姿态,力传感器则可以精确感知机器人与物体之间的作用力,从而实现更加安全、智能的操作。在人机协作场景中,力传感器能够实时监测机器人与操作人员之间的接触力,一旦检测到异常,立即停止运动,有效保障了人员安全。深度融合的人工智能技术:通过引入人工智能技术,捷博特机器人实现了智能化的决策和学习能力。机器人可以根据实时采集的数据和预设的算法,自主判断并选择比较好的操作方案。精密制造楷模,捷博特机械手,细节之处尽显精细品质。
力传感器是捷博特机械手实现精细操作的关键部件之一。它能够实时感知机械手与物体之间的作用力,通过反馈控制系统,精确调整机械手的抓取力度,避免因用力过大或过小而导致物体损坏或掉落。在3C电子行业的精密装配中,力传感器可以确保机械手在抓取微小电子元件时,既不会对元件造成损伤,又能保证抓取的稳定性。视觉传感器赋予了捷博特机械手“视觉”能力,使其能够快速识别物体的形状、位置和姿态。通过先进的图像识别算法和深度学习技术,机械手可以在复杂的环境中准确地定位目标物体,并根据预设的程序进行抓取、搬运和装配等操作。在物流仓储行业,视觉传感器可以帮助机械手快速识别货物的条形码或二维码,实现货物的自动分拣和入库。力控稳定可靠,抓取轻柔,保护物料安全。萍乡智能捷博特
在汽车零部件生产中,捷勃特机器人承担搬运、涂胶等任务,重复定位精度高,保障产品装配一致性。新余多功能捷博特
一、从机械臂到智能体:一场颠覆传统的技术跃迁在德国汉诺威工业博览会的展台上,捷博特发布的第七代协作机器人用0.8秒完成手机主板精密装配,定位精度达到±0.02mm——这个数字不*刷新行业记录,更标志着工业机器人从“程序执行者”向“自主决策者”的进化。作为全球工业机器人领域的创新,捷博特通过三大技术突破重塑产业逻辑:1.仿生关节驱动技术自主研发的模块化关节模组,融合谐波减速器与力矩传感器,实现0.01N·m级别的力度感知。新余多功能捷博特
- 广州智能捷博特答疑解惑 2026-06-23
- 泉州新能源捷博特用途 2026-06-23
- 三明大型捷博特销售电话 2026-06-22
- 莆田新能源捷博特售后服务 2026-06-22
- 嘉兴国产捷博特机械臂 2026-06-21
- 南昌大型捷博特机械手 2026-06-21
- 南京轻量型捷博特销售电话 2026-06-20
- 新余轻量型捷博特销售电话 2026-06-20
- 三明智能捷博特解决方案 2026-06-19
- 莆田智能捷博特技术指导 2026-06-19
- 六安国产捷博特销售电话 2026-06-18
- 湖州国产捷博特技术指导 2026-06-18

