
- 品牌
- 领先光学技术公司
- 型号
- lxgx-004
机器视觉缺陷检测是基于缺陷库的比对和匹配来判别缺陷是否超出要求,缺陷检测需要建被检测物品的缺陷库,并通过快速比对实物与缺陷库来代替人眼作出是否合格的判别。缺陷检测需要尽可能大的光学视场,以能分辨出小缺陷要求为极限分辨率的标准(由于人眼的极限分辨率是0.1mm,因此,缺陷检查一般需要挑出大于0.1mm,可能大的光学视场,即尽可能小的光学倍率和尽量大的景深水提高效率,这与尺寸测量的要求正好相反。机器視觉检测系统基于高分辨率工业相机和视觉软件,可对产品进行外观检测、尺寸测量、角度测量、字符识别等。缺陷检测系统可根据用户需求及设定的技术指标要求自动进行检测,并对有缺陷部位进行标识,或者根据需要自动分拣、剔除,为行业检测提供比较好解决方案,提高系统的自动化程度。实现车身A区、B区的漆面全自动检测,检出率高达99%以上。全自动汽车面漆检测设备供应商
汽车面漆检测设备
所述花键孔25内可滑动的设置有末端伸入所述锁定槽21内的花键杆23,所述花键杆23与所述花键孔25端壁间设置有复位弹簧26,当向下按压所述机身10时,所述花键杆23自上而下依次卡入所述锁定槽21内,从而调整机身10与所述汽车表面距离,所述机身10上方设置有可转动的手动轮27,将所述手动轮27转动半周通过所述机身10顶壁内设置的联动装置98可以带动所述花键杆23转动半周,此时所述机身10再所述顶压弹簧12作用下上移。有益地,所述传动装置99包括所述传动腔42顶壁内设置的齿轮腔50,所述齿轮腔50与所述传动腔42之间转动设置有第二转轴36,所述第二转轴36顶部末端转动设置于所述转动腔14顶壁内,所述第二转轴36内设置有上下贯通的贯通孔35,所述传动腔42内的所述第二转轴36底部末端固定设置有与所述螺纹套41外表面固定设置的diyi锥齿轮43啮合的第二锥齿轮38,所述齿轮腔50内的所述第二转轴36外表面固定设置有diyi齿轮37,所述齿轮腔50内可转动的设置有与所述齿轮腔50底壁内固定设置的第二电机48动力连接的第三转轴51,所述齿轮腔50内的所述第三转轴51外表面固定设置有与所述diyi齿轮37啮合的第二齿轮49,所述第三转轴51顶部末端伸入所述转动腔14顶壁内开口向下设置的凹槽54内。太原汽车面漆检测设备为绚彩涂装安装智慧大脑,不断开启技术创新新局面。

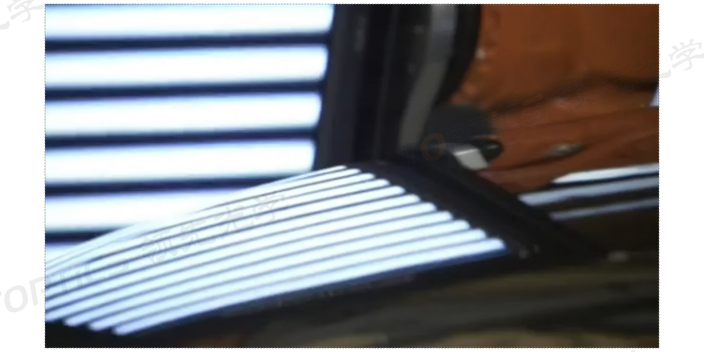
1)读取横条纹图像组,对横条纹图像分别进行横向条纹分割得到横向亮条纹图像和横向暗条纹图像,针对横向亮条纹图像进行二值化、边缘腐蚀,得到横向亮条纹检测区域,在横条纹图像组中分别分割出横向亮条纹灰度检测区域,对横向亮条纹灰度检测区域进行二值化与特征提取,提取得到横向亮条纹中的外观缺陷;同样依据上述处理过程可得到横向暗条纹图像中的外观缺陷;步骤(2)读取竖条纹图像组,对竖条纹图像分别进行横向条纹分割得到竖向亮条纹图像和竖向暗条纹图像,针对竖向亮条纹图像进行二值化、边缘腐蚀,得到竖向亮条纹检测区域,在竖条纹图像组中分别分割出竖向亮条纹灰度检测区域,对竖向亮条纹灰度检测区域进行二值化与特征提取,提取得到竖向亮条纹中的外观缺陷;同样依据上述处理过程可得到竖向暗条纹图像中的外观缺陷;步骤(3)读取漫射均匀图像,对漫射均匀图像进行二值化、特征提取、特征筛选操作后,提取得到漫射均匀图像中的外观缺陷;步骤(4)外观缺陷整合,将步骤(1)中提取得到的外观缺陷、步骤(2)中提取得到的外观缺陷与步骤(3)中提取得到的外观缺陷逐一进行缺陷匹配,对形状匹配一致的外观缺陷进行剔除,从而得到汽车漆面表面外观缺陷。
本发明的设备再喷涂时将喷涂区域密封,避免了油漆外漏污染汽车表面油漆。附图说明为了更清楚地说明发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图jinjin是发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。下面结合附图和实施例对本发明进一步说明。图1是本发明的一种汽车外漆修补抛光一体机整体结构示意图。图2是图1中仰视图。图3是图1中a-a的结构示意图。图4是图1中b的放大结构示意图。具体实施方式下面结合图1-4对本发明进行详细说明,其中,为叙述方便,现对下文所说的方位规定如下:下文所说的上下左右前后方向与图1本身投影关系的上下左右前后方向一致。结合附图1-4所述的一种汽车外漆修补抛光一体机,包括机身10以及设置于所述机身10底壁内开口向下的转动腔14,所述转动腔14圆周壁内设置有开口向下的环形滑槽11,所述环形滑槽11内可滑动的设置有用于防止油漆扩散的密封罩15,所述密封罩15与所述环形滑槽11顶壁间设置有顶压弹簧12,所述转动腔14内可转动的设置有转动架13。汽车漆面表面外观缺陷检测系统及方法将极大的提升汽车外观质量及外观质量的检测效率。

机器人式缺陷检测系统采用机器人来布置光源和相机。该系统的检测硬件由4台搭载检测单元的机器人组成,安装在面漆烘房出口的在线检查工位。检测单元将光源和相机集成在一个单元中.亮点是一块可显示不同光源模式的LED显示屏。车身的每一处位置会通过不同的光源模式(单色光、条纹光等)在不同方向上进行多次检测,通过叠加采样实现2D图像+3D轮廓的图像识别方式。机器人式缺陷检测系统可以实现小,比较大可实现单线60JP1的检测能力,单线投资1500~2000万元。机器人式缺陷检测系统识別精度高,受益于其多次检测+叠加采样的图像采集方式,对于凹凸、缩孔等3D缺陷识别效率较高。但鉴套系统结构较复杂,1个检测站需要配置4台机器人,针对多车型需要分别进行轨迹示教,投资维护成本较高。 随着工业4.0时代的到来,这一趋势不可逆转。十堰快速汽车面漆检测设备供应商
汽车面漆检测设备可应用于不同行业、不同应用的生产和制造过程中的质量控制。全自动汽车面漆检测设备供应商
目前汽车车身的漆面缺陷检测主要是依赖传统的人工目视检查,因检测效率低、检测标准不够客观,并且容易受人工分心、疲劳等主观因素的影响,越来越难以满足工艺过程的测量和检测要求。因此,对自动化缺陷检测装置的需求日益增强,这种自动化缺陷检测装置不*可以严格地管控产品质量,还能及时对产品缺陷进行工艺溯源,为工艺品质改善提供数据支持。车身漆面的缺陷种类繁多,不同的生产厂家对缺陷的定义存在差异。从缺陷的光学成像形式可以归类为:色差类缺陷、脏污类缺陷、纹理类缺陷、划伤碰伤类缺陷、凹凸类缺陷。单一的2d成像方式和检测方法难以应对常见的缺陷,对所有缺陷同时的检测,往往需要2d成像方式和3d成像方式相互结合。3d成像方式中激光三角法和条纹投影,是对高度的重建。基于条纹投影原理的三维重建设备,主要应用于漫反射物体。激光三角法可以应用于类镜面物体的高度测量,但是难以检测微米级别的缺陷。3d成像方式中,光度立体法和条纹反射(相位测量偏折术)是对梯度的重建。基于朗伯光照模型的光度立体法对漫反射表面的梯度重建精度较高,但很难直接应用于镜面物体。相位测量偏折术对镜面物体的梯度重建精度很高,在原理上可以到达亚微米级别。 全自动汽车面漆检测设备供应商
领先光学技术(江苏)有限公司成立于2019年,公司总部地址位于武进区天安数码城内独栋12-2#写字楼。我们的种子企业“ling先光学技术(常熟)有限公司”成立于2014年,是国家高新技术企业、科技型中小型企业、江苏省民营科技企业、雏鹰企业。知识产权80余项(发明**8项)。内核团队:教授2名、博士2名、行业渠道关键人4人。长期稳定与复旦大学、大连理工大学合作。底层技术包括:光学(相位偏折、白光干涉、白光共焦、深度学习);MicroLED(发光器件、透明显示、微型投影)。是做一件“利用光学进行工业质量检测设备的生产和制造”。自主开发光学系统和底层内核算法,拥有十年以上行业经验,主要应用于:汽车玻璃检测行业、片材检测行业、半导体材料检测行业,我们的战略新产品:微米级光刻机已经完成版流片,也正在一步步趋于稳定和成熟。公司在科技的浪潮中,已经具有将内核技术转化为产品的经验与能力。公司是高科技、高成长性企业,公司不断的夯实自身技术基础,愿成为中国工业发展中奠基石的一份子,打破国外的智能装备的,树名族自有高技术品牌。
第三阶段:(1986-1995年)可称为阴极电泳、普及涂装前磷化处理阶段。在六五期间一汽、二汽、济汽从HadenDrossy公司引进车身涂装技术浸式磷化处理、阴极电泳、Hydrospin喷漆室和推杆式运输链等,建成的涂装线于1986年7月投产。在之后的10年中,根据中国汽车工业公司“消化引进的车身涂装技术,为行业服务,挡住重复引进”的指示,一汽、二汽、济汽认真消化引进技术的基础上,为兄弟汽车厂设计和包建了几十条车身涂装线。为适应轿车工业的发展,自1988年起为与引进的轿车产品配套,上海大众引进了六万辆轿车车身涂装线,一汽自己设计了CKD和奥迪(AUDI)轿车车身涂装线并于1991年建成投产,广...
- 莆田高精度汽车面漆检测设备哪家好 2025-11-19
- 泉州高精度汽车面漆检测设备生产厂家 2025-11-13
- 大同高精度汽车面漆检测设备供应商 2025-11-13
- 长春高精度汽车面漆检测设备品牌 2025-11-13
- 太原快速汽车面漆检测设备推荐厂家 2025-11-13
- 吉林高精度汽车面漆检测设备推荐 2025-11-12
- 宜昌全自动汽车面漆检测设备供应商 2025-11-12
- 大同光学方法汽车面漆检测设备推荐 2025-11-12
- 沈阳快速汽车面漆检测设备 2025-11-11
- 芜湖全自动汽车面漆检测设备 2025-11-11




- 景德镇汽车面漆检测设备 2025-11-08
- 武汉快速汽车面漆检测设备质量好价格忧的厂家 2025-11-08
- 黄石汽车面漆检测设备品牌 2025-11-07
- 本溪高精度汽车面漆检测设备源头厂家 2025-11-06
- 齐齐哈尔工业质检汽车面漆检测设备供应商 2025-11-06
- 安徽偏折光学法汽车面漆检测设备价格 2025-11-05





- 上海工业玻璃面型检测费用 04-13
- 东莞平面度玻璃面型检测咨询 04-13
- 杭州不规则玻璃面型检测联系人 04-13
- 镇江平面度玻璃面型检测供应商家 04-13
- 镇江视觉玻璃面型检测哪家好 04-13
- 扬州高铁玻璃面型检测采购 04-12
- 广州平坦度玻璃面型检测 04-12
- 深圳玻璃面型检测费用 04-12
- 苏州大面幅玻璃面型检测质量好价格忧的厂家 04-12
- 宁波玻璃面型检测电话 04-12